Les robots
1. Qu’est ce qu’un robot et que font ils ? ( en général )
Un robot est une structure articulée avec un ou plusieurs membres, qui fonctionnent grâce à de nombreux moteurs permettant ainsi au robot de faire des mouvements. Ces mouvements seront toujours contrôlés par l’Homme, grâce à un programme créé auparavant ou encore à l’aide d’une télécommande qui dirigera le robot. Les robots ont commencé à apparaître lors des années 1960 dans le secteur secondaire afin de réaliser des tâches répétitives avec une précision constante, mais à cette époque, ils n’étaient pas encore très présents dans ce secteur à cause du prix élevé qui dépassait souvent la main d’oeuvre humaine.
Désormais, depuis les années 2000, les robots sont implantés dans presque tous les domaines, pour tous les usages, comme :
Source : Emission "C'est pas sorcier : les robots." : https://www.youtube.com/watch?v=nKp0hxmPalE
L’industrie : Aujourd’hui, les robots dans les industries automobiles à grande échelle sont omniprésents.
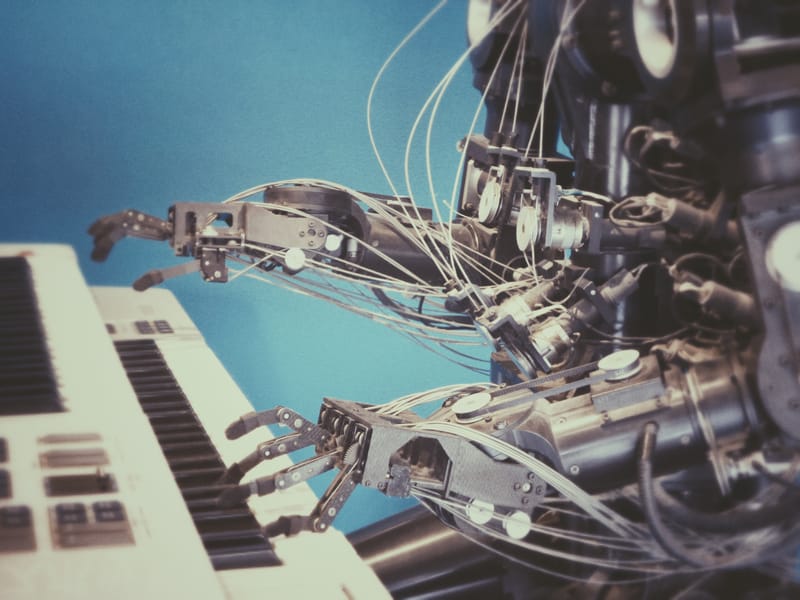
 Mars Exploration Rover : MER
Mars Exploration Rover : MER
L'exploration spatiale : De nombreux robots sont envoyés dans l’espace car l’homme ne peut pas y accéder en raison d’environnements mortels.
 Mars Exploration Rover : MER
Mars Exploration Rover : MER
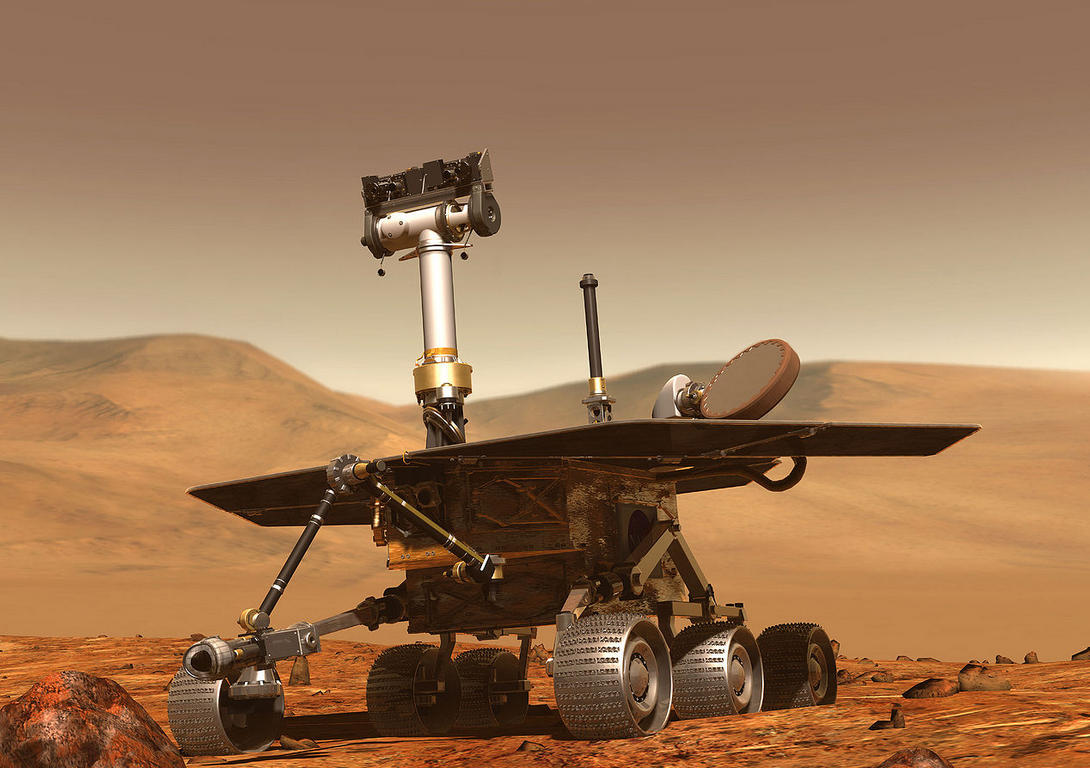
Le domaine militaire : Ces robots sont utilisés à distance et sont très utiles pour de diverses missions, comme le ravitaillement en arme ou en provisions pour les militaires sur des terrains de guerre, ou encore pour l'exploration.
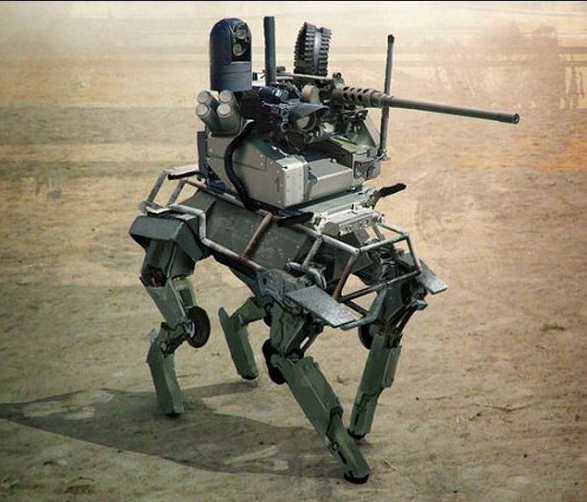
Sources :https://www.google.com/search?q=robot+militaire+i+robot&client=firefox-b-is-oem1&source=lnms&tbm=isch&sa=X&ved=0ahUKEwjAsODwrrPeAhWB4YUKHbXVBZcQ_AUIDigB&biw=1920&bih=966#imgrc=EfpH7UWxpz61mM::
La médecine : Les robots jouent un rôle majeur depuis les années 2000. Ils permettent de réaliser des opérations avec plus de précision et surtout moins invasives.
 Robot Da vinci
Robot Da vinci
Sources : htps://fr.wikipedia.org/wiki/Usage_des_robots
https://www.chu-toulouse.fr/-chirurgie-robotique-da-vinci-r-
2. Comment fonctionnent-t-ils et de quoi sont-ils constitués ?
Un robot chirurgien est constitué de 3 parties principales :
- Une structure mécanique qui sera le squelette du robot. Une attention particulière doit être portée aux articulations car celles-ci doivent permettre un débattement assez important relatif à l'utilisation voulue.
- La deuxième partie composante d'un robot correspond aux différents capteurs sensoriels équipant le robot pour une application particulière.
- La troisième partie correspond à la partie commande. Le chirurgien à l’aide de joysticks et d’un algorithme pourra intervenir sur le patient avec une précision allant jusqu’au mm.
Cette précision apportera du confort pour le chirurgien car l’algorithme lui permettra ainsi d’obtenir une très grande précision et lui empêchera de faire des erreurs qui se produisent assez souvent en médecine. Cela apportera de surcroît au patient moins de séquelles causées par le chirurgien donc un meilleur rétablissement et moins de mauvaises surprises.
Comment fonctionnement-ils ?
Les Robots chirurgiens peuvent porter des instruments de chirurgien, facilement changeables grâce à un aimant. Certain robots sont équipés d’un écran qui permet au chirurgien de voir ce qui se passe, il peut zoomer, ou placer des marqueurs sur l’image pour faciliter l’opération. Le chirurgien peut effectuer virtuellement une simulation d’une opération qui aura lieu sur un patient. L’opération est ensuite envoyée au robot qui pourra l’effectuer.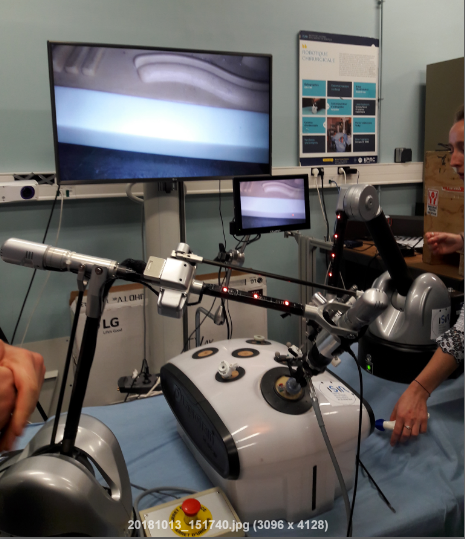 Manette utilisée pour contrôler un robot chirurgien
Manette utilisée pour contrôler un robot chirurgien
Dans ce cas, notre robot chirurgien nommé Da Vinci sera composé d’une plateforme avec deux éléments. Au contact du patient, le robot est une grosse machine avec quatre longs bras mobiles télécommandés. L'un porte une caméra endoscopique, les trois autres de fins instruments chirurgicaux adaptés à une chirurgie cœlioscopique (qui se pratique à travers une incision de quelques millimètres). L'autre partie, positionnée à quelques mètres, est une console devant laquelle s'assied le chirurgien. De là, confortablement installé, il visionne la zone opératoire agrandie et en 3D.
Il existe deux types de robots en chirurgie : les robots collaboratifs (ils aident le chirurgien à faire un mouvement pour une meilleure précision) et les robots autonomes : ils exécutent l’opération seuls, avec toujours un chirurgien à coté pour éviter des problèmes car les humains peuvent agir suite à un imprévu.
Source : Fête de la science, Institut des Systèmes Intelligents et de Robotiques, conférence avec un chirurgien utilisant les robots chirurgicaux, octobre 2018.
Exemple d'opération par le robot Da Vinci :
Les capteurs :
Les capteurs permettent aux robots de recevoir des informations sur leur environnement. Ces informations dans notre cas seront entièrement retranscrites au chirurgien afin de recevoir des informations diverses et variées (position, température du patient, etc...)
Il existe différents types de capteurs présents sur certains types de robots :
- Les capteurs visuels, ex : caméras. Elles sont installées sur les robots chirurgiens qui transmettent les images au chirurgien, ce qui lui permet de voir l’intérieur d’un patient. Ils peuvent parfois fonctionner à l’aide d’ultrasons.
- les capteurs de toucher (fonctionnant souvent grâce à une pression). Ils permettent au robot de savoir où il se situe et de détecter la présence d’un objet. Le robot chirurgien peut aussi enregistrer tout ce qui a eu lieu depuis le début de l’opération pour savoir où il se trouve et tout ce qui s'est passé pendant l'opération en cours.
- Les autres capteurs : il existe plusieurs autres types de capteurs comme les capteurs thermiques, les capteurs de distance (par rayon), certains permettant d’analyser un échantillon, ou de prendre le pouls d’un patient.
Ces capteurs peuvent être utilisés pour un robot chirurgien autonome, mais ils sont plus souvent utilisés pour informer le chirurgien dans le cas des robots collaboratifs (qui aident le chirurgien).
Fonctionnement du capteur de lumière :
La vision est une capacité des robots. Elle leur permet de distinguer des formes et des couleurs dans une scène. La lumière se propage en ligne droite :
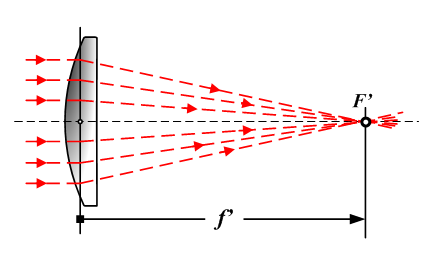
Ici les rayons lumineux sont représentés en rouge.
Pour un capteur de lumière, les rayons lumineux traversent d'abord la lentille convergente (en gris). Celle-ci permet de rediriger les rayons lumineux vers l'écran, sur lequel se forme donc l'image. Ensuite, un capteur traduit les signaux lumineux en signaux électriques que le robot utilisera pour distinguer son environnement et agir.
Comment sont-ils créés ?
Le secteur le plus connue fabriquant les robots chirurgiens est celui de la MedTech. Elle a été fondée en 2002, qui a mis au point le robot chirurgical Brigit puis le robot Rosa, un robot à guidage laser capable d’assister le bras du neurochirurgien dans les opérations du cerveau et de la colonne vertébrale. La MedTech désigne toutes les technologies utilisées pour soigner, sauver ou améliorer la vie de patients souffrant de pathologies de toutes sortes. La récente révolution numérique et les progrès en matière d’intelligence artificielle ont permis à la MedTech de connaître ces dernières années des avancées spectaculaires dans bien des domaines. Il existe plus de 250 000 entreprises dans le secteur de la MedTech en Europe, ce sont ces entreprises qui innovent dans le domaine de la médecine, et certaines fabriquent les robots chirurgiens. Le robot Rosa par exemple, a été mis au point par MedTech. Le secteur de la MedTech met le progrès technologique au service du monde médical pour inventer la médecine de demain. Les promesses de ce secteur sont nombreuses : prothèses et implants nouvelles générations, diagnostics facilités, suivi médical optimisé, mise au point de traitements révolutionnaires, création d’objets médicaux connectés.
Source : https://www.welcometothejungle.co/articles/la-medtech-la-medecine-de-demain
Exemple de robots:
Les robots chirurgiens peuvent aujourd’hui effectuer un grand nombre d’opérations différentes, et celle de la cataracte est l’une des plus pratiquée, comme pour l’ablation de la prostate.
AXSIS, un système développé par Cambridge Consultants, est un petit robot téléopéré avec deux bras incliné avec de minuscules pinces. Il est conçu pour fonctionner sur l’œil avec une plus grande précision qu’un humain.
Il existe aussi des robots optiques :
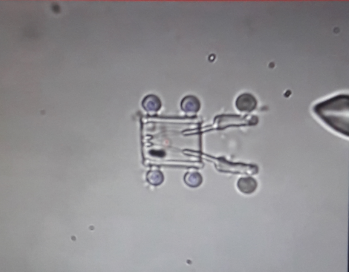 Robot optique vu sur un écran d'ordinateur
Robot optique vu sur un écran d'ordinateur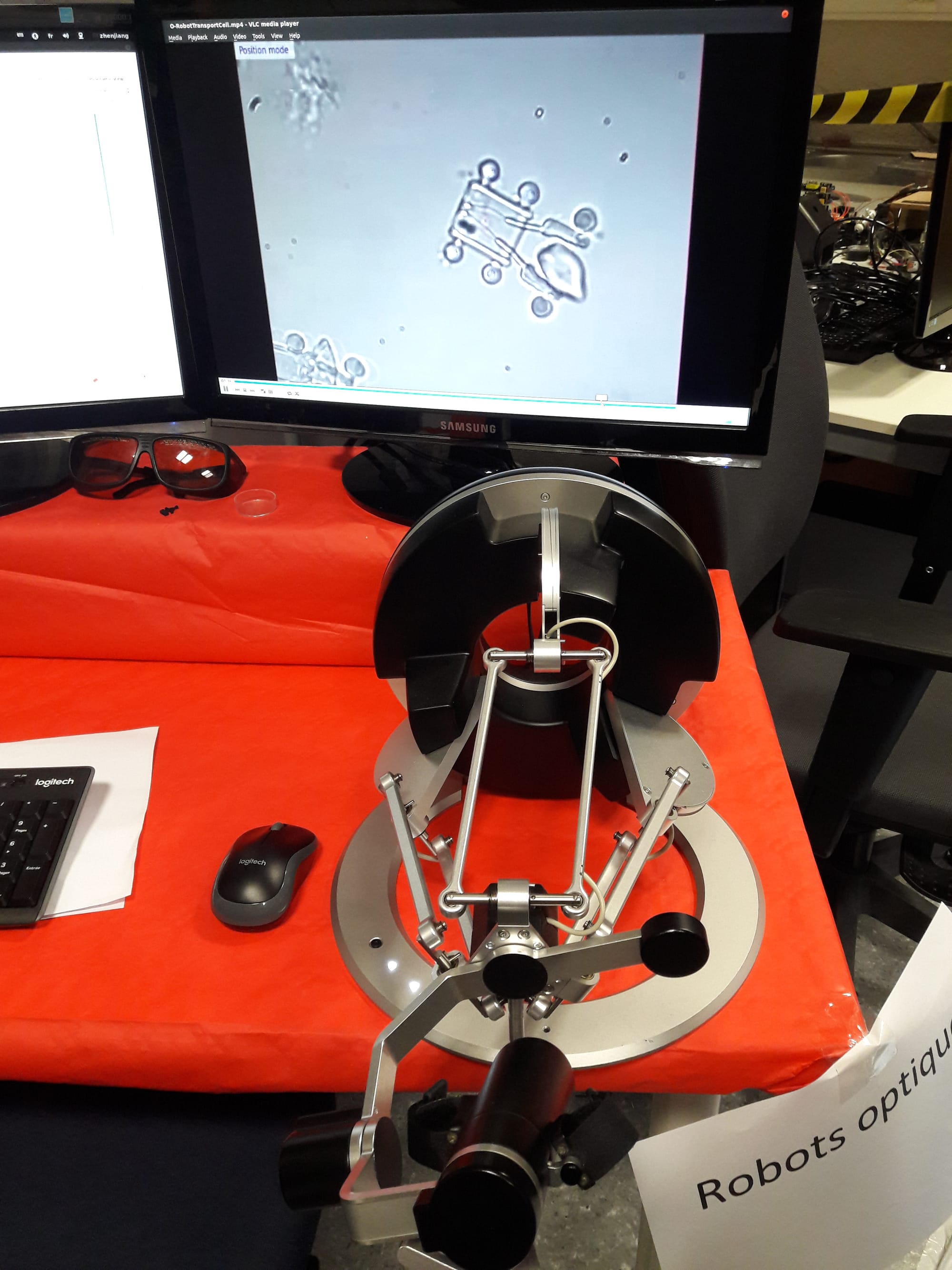 Manette manipulant le robot optique. Celui-ci prend dans ses pinces une cellule
Manette manipulant le robot optique. Celui-ci prend dans ses pinces une cellule
Ces robots optiques mesurent quelques nanomètres et sont créés à partir d’un liquide qui va durcir pour avoir la forme du robot. C’est un projet qui est expérimenté pour le domaine de la chirurgie, car sa taille lui permet de déplacer des cellules. Cependant, il n'est pas encore utilisé dans le domaine chirurgical.
Source : Fête de la science, Institut des Systèmes Intelligents et de Robotiques, octobre 2018.